結論から言うと以下の対応しました。
- 同意する(しかない)
- ログインしたらbacklogのスペース設定から機能をOFF(デフォルトON)
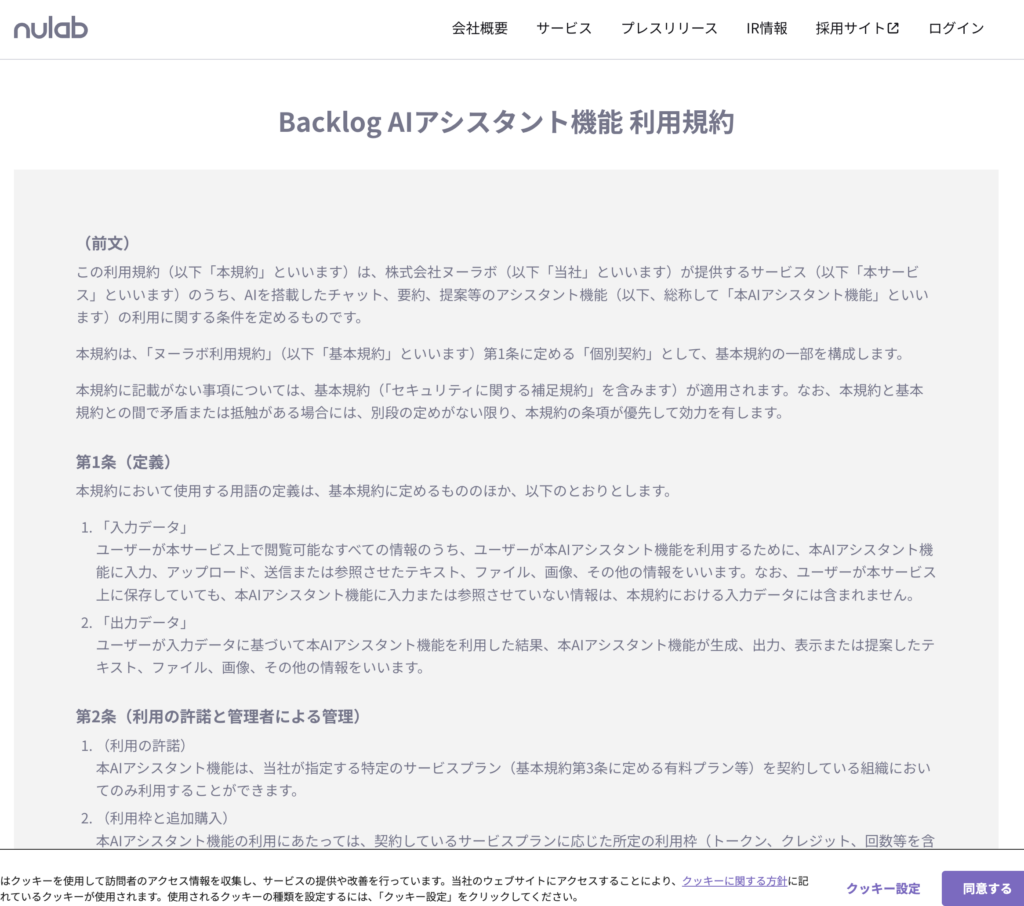
nulabさんのBacklogを使っているのですが、チケットを開こうとしたらこんなページが表示された。
【重要】「Backlog AIアシスタント機能」のリリースと利用規約の追加
いつもご利用ありがとうございます。
生成AIを活用して業務を効率化する「Backlog AIアシスタント機能」(要約・提案等)をリリースいたしました。
これに伴い、ヌーラボ利用規約の一部として「Backlog AIアシスタント機能 利用規約」を制定いたします。
本機能は、お客様のデータを安全に保護するため、以下のルールに基づいて運用されます。
【安心・安全のための重要事項】
学習利用なし: お客様が入力したデータは、AIモデルの学習には一切利用されません。
秘密情報の保護: 入力データおよび出力結果は、秘密情報として厳格に管理されます。
詳細な条件については、以下のリンクより規約全文をご確認ください。
Backlog AIアシスタント機能 利用規約
【ご注意】
ご契約プランや設定、権限により、本機能をご利用いただけない場合があります。
同意は「Backlog AIアシスタントの利用」を強制するものではありません。(機能を利用しない限り、Backlog AIアシスタントへのデータ入力は行われません)
【管理者の方へ】
本機能は標準で「有効」となっておりますが、組織の方針に合わせて管理画面でいつでも「無効」に変更できます。
※無効化した場合、AI処理のためにデータが外部(第三者AIサービス等)へ送信されることは一切ありません。
https://backlog.com/ja/blog/important_notice_20260205/
新機能のリリースはいいんですが、「Backlog AIアシスタント機能 利用規約」に同意しないと通常の機能も使えない。
また、「同意は「Backlog AIアシスタントの利用」を強制するものではありません。(機能を利用しない限り、Backlog AIアシスタントへのデータ入力は行われません)」とありますが、機能をOFFにするには同意しないと管理者画面にも行き着けない。
Backlogではなく「Backlog AIアシスタント機能 利用規約」に同意が必須、OFFにするまでは自動でONになっている。
ちょっとずるいというか、改善の余地があるつくりだと思う。
「本機能は標準で「有効」となっておりますが、組織の方針に合わせて管理画面でいつでも「無効」に変更できます。」機能使ってほしい気持ちはわかるけど、OFFで利用開始する導線あってもよくない?
学習されたからって、即悪用されるか?は別として、管理者にオプトアウトで開始する導線を用意してない(見つからない)のは企業のデータ預かるシステムとして少し残念。